Autonomes Fahren im Praxistest: ZF Teststrecke im Selbstversuch – Teil 2
Um automatisierte Fahrfunktionen im realen Straßenverkehr zu testen, hat die ZF Friedrichshafen gemeinsam mit dem Institut für Weiterbildung, Wissens- und Technologietransfer (IWT) letzten Herbst eine Testtrecke ausgestattet, auf der Kleinbusse, Autos und Prototypen zu Testzwecken Daten sammeln und gängige Situationen des autonomen Fahrens in der Praxis erprobt werden können.
Wir haben einen Selbstversuch gewagt und sind die Teststrecke mit unserem Connected Car Experten Markus Beller abgefahren. Die zentralsten Herausforderungen haben wir im Teil 1 der Blogserie „Autonomes Fahren im Praxistest: ZF Teststrecke im Selbstversuch“ mit Videoanalyse bereits zusammengefasst. Hier im Teil 2 werden weitere Situationen beschrieben und mögliche Lösungsszenarien skizziert. Die Karte zeigt, wo die Situationen aufgetreten sind:

Los geht’s….
Wir starten unsere Testfahrt beim Skater-Park in der Ravensburger Straße und fahren dort auf die B31 auf, um an den Punkt zu kommen, wo die Teststrecke beginnt. An dieser Auffahrt begegnen wir bereits einer der ersten Herausforderung für autonome Fahrzeuge.
Abbiegen an einer Kreuzung
Hier sieht man eine Kreuzung, bei der die Vorfahrt zu beachten ist – kenntlich gemacht durch ein Verkehrszeichen und eine blinkende Ampel. Allerdings müssen dafür die Verkehrszeichen auf der linken Seite (rote Ampel und das Schild „Vorfahrt“) ignoriert werden. Der Verlauf der Abbiegespur ist mit Schnee überlagert und damit schwerer zu erkennen. Ebenso können Fußgänger oder Fahrradfahrer an dieser Stelle die Straße überqueren.

Herausforderung: Erkennen der Verkehrssituation an Kreuzungen
Das autonome Fahrzeug muss Verkehrssituationen unterschiedlicher Komplexität erkennen. Dazu gehören insbesondere Kreuzungen, bei denen viele Verkehrsregeln beachtet werden müssen und auch Passantenverkehr herrscht. Hier ist wichtig, dass es verschiedene Ampelhersteller gibt. Problematisch wird es, wenn die Ampeln beispielsweise ausfallen. Auch müssen die Ampeln interpretierbar sein, wenn diese durch einen großen LKW verdeckt sind.
Mögliches Lösungsszenario: Über V2X kann eine Kommunikation mit der Infrastruktur stattfinden. V2X beschreibt die elektronische Kommunikation der Teilnehmer am Verkehr untereinander in den Formen:
- Fahrzeug-zu-Fahrzeug (V2V)
- Fahrzeug-zu-Straße (V2R)
- Fahrzeug-zu-Infrastruktur (V2I)
- Fahrzeug-zu-Netzwerk (V2N) und
- Fahrzeug-zu-Personen (V2P).
Auch die Künstliche Intelligenz (KI) muss mit Störfaktoren wie Schnee umgehen können und auch unter solchen Bedingungen trainiert werden.
Start der ZF Teststrecke
Hier startet die ZF Teststrecke. An dieser Stelle fahren die Fahrzeuge auf die Bundesstraße. Das Fahrzeug muss sich verkehrskonform auf die Strecke einfädeln.

Herausforderung: Sicheres Einfädeln auf die Straße
Gerade bei hohen Geschwindigkeitsunterschieden, wie z. B. auf der Autobahn, kann Einfädeln eine Herausforderung darstellen. Ebenso müssen Signale von Verkehrsteilnehmern, wie beispielsweise das Blinken, erkannt werden.
Mögliches Lösungsszenario: Bereits heute sorgen Radare für die Erkennung von Geschwindigkeit sowie Entfernung und werden in ADAS (englisch: Advanced Driver Assistance Systems) Systemen eingesetzt – wie beispielsweise der „Tote-Winkel-Assistent“. Die Systeme müssen dabei auch über 100 m weit „nach hinten“ schauen. Diese Technologie wird auch für das autonome Fahren verwendet und weiterentwickelt.
Einfahrt in den Tunnel
Bei der Einfahrt in den Tunnel verschwindet häufig das GPS Signal, das für die Standortbestimmung, Validierung und Navigation des Fahrzeugs wichtig ist. Außerdem sieht man eine Ampel, die nur bei Bedarf geschaltet ist, ebenso eine Veränderung der Lichtverhältnisse. Durch die gute Ausleuchtung sollte das jedoch kein Problem darstellen.

Herausforderung: Verlieren des GPS Signals
Die Einfahrt in den Tunnel kann dazu führen, dass die Stärke und Präzision des GPS Signals nachlässt und verloren geht. Somit ist eine konkrete Ortung nicht mehr möglich.
Mögliches Lösungsszenario: Es gibt bereits verschiedene Mechanismen zum Berechnen der wahrscheinlichen Position auf der Karte. Heutzutage ist dies aber eine ergänzende Funktion, die dem Fahrer dabei hilft, die korrekte Situation einzuschätzen. Ein autonomes Fahrzeug muss dementsprechend fehlerrobust handeln und nicht z.B. mitten auf der Straße stehen bleiben.
Schwierige Lichtbedingungen
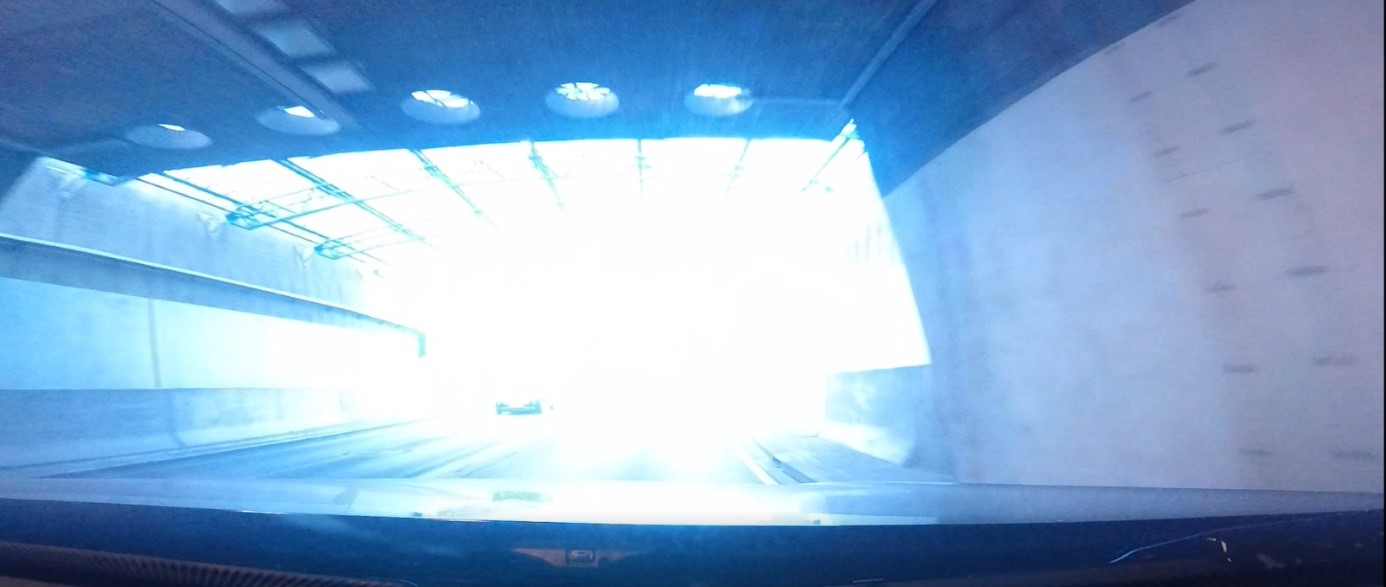
Herausforderung: Wechselnde Lichtverhältnisse
Die vorübergehende Beeinträchtigung der Sensorik ist eine große Herausforderung. Die Sensorik muss in verschiedensten Umgebungen ein zuverlässiges Ergebnis liefern.
Mögliches Lösungsszenario: Das System muss verstehen, wann ein Sensor unzuverlässige Informationen liefert oder nur eine eingeschränkte Funktion hat und diese automatisch nachregeln und unterschiedliche Sensoren involvieren (Lidar, Kamera, Radar).
Zwei Abbiegespuren und ein mobiles Verkehrsschild
Hier gibt es zwei Abbiegespuren. Das Fahrzeug muss sich in eine passende Spur einfädeln. Ebenso muss das Fahrzeug erkennen, wenn beispielsweise eine Spur blockiert ist oder, wie im Bild zu sehen ist, ein Verkehrsteilnehmer (wie ein LKW) beide Spuren nutzt. Ebenso ist ein mobil aufgestelltes Schild „Straßenschäden“ zu erkennen. Hier ist das Erkennen und Interpretieren dieses Sachverhaltes notwendig.

Herausforderung: Erkennen von dynamischen Verkehrssituationen (wie aufgestellte Schilder)
Die Herausforderung besteht darin, die dadurch veränderbare Verkehrsdynamik, z.B. durch ein temporäres Verkehrsschild, zu meistern und in ein bekanntes Schema anzupassen, auch unter Berücksichtigung von Nicht-PKWs (LKW, der zwei Spuren benutzt).
Mögliches Lösungsszenario: Ein zentrales dynamisches Kartenupdate mit genauen Routeninformationen kann hierbei unterstützen. Ebenso die Verkehrszeichenerkennung über hochauflösende Kameras. Für den Fall, dass ein Verkehrsteilnehmer zwei Spuren nutzt, muss die KI einen defensiven Fahrstil wählen und einschätzen können, ob die Fahrspur zur Verfügung steht. Ebenso wichtig sind das Interpretieren und Einhalten von eindeutigen Regeln, die heute eventuell eine Grauzone darstellen. Des Weiteren sind Radarsensorik und Lidar dafür zuständig, um die Geschwindigkeit und Entfernung zu bestimmen.
Überraschende Verkehrssituationen und Erkennung von Verkehrsteilnehmern
Hier beim Sauerstoffwerk muss ein Fahrzeug auch mit überraschenden Situationen umgehen können, wie beispielsweise einem querstehenden Tanklaster, der aus- oder einfährt. Auch das Erkennen von Aus-/Einfahrten, die nicht regelmäßig genutzt werden (bzw. eingezeichnet sind), ist wichtig.

Herausforderung: Umgang mit ungewohnten Situationen (z.B. querstehender Laster)
Mögliches Lösungsszenario: Wichtig ist das Training der KI auf ungewohnte Situationen, zum Beispiel über virtuelle Testszenarien und über viele Millionen Testkilometer. Gerade bei ungewohnten Situationen ist wichtig, dass die KI sich korrekt verhält, um einen Unfall zu verhindern.
Unübersichtliche Straßensituationen
Auf der linken Seite sehen wir einen Spiegel, der bei dieser unübersichtlichen Stelle dabei hilft, um die Ecke zu schauen. Dies kann ein autonomes Fahrzeug aktuell noch nicht.

Herausforderung: Unübersichtliche Verkehrssituationen
Mögliches Lösungsszenario: Durch verschiedenste Sensorik (Kamera, Radar, GPS) verschafft sich das Fahrzeug ein möglichst realistisches Modell des Umfelds. Durch eine Kombination dieser Sensoren (auch Sensorfusion genannt) erstellt sich das Fahrzeug ein Abbild der Umgebung auch bei unübersichtlichen Situationen. V2X kann dem Fahrzeug helfen, um die Ecke zu schauen, indem es Informationen erhält, die für die Sensorik nicht genau zu identifizieren sind.
Verschiebung von Orientierungspunkten oder POIs
An dieser Stelle sieht man eine mobile Bushaltestelle, die aufgrund der Baustelle verschoben wurde. Busse könnten hier überraschend halten.

Herausforderung: Mobile POIs
Das Fahrzeug erwartet einen POI wie eine Bushaltestelle, der POI ist jedoch verschoben. Ein autonomer People Mover bzw. ein Robotaxi könnte an dieser Stelle verwirrt sein.
Mögliches Lösungsszenario: Abgleich mit anderen Quellen wie HD Maps. Update dieser Karten „over the Air“ – auch hier ist die Robustheit der KI gefragt und dass ein Training mit solchen Situationen stattfindet.
Verdeckte Zebrastreifen und Verkehrsteilnehmer
Der Fußgängerweg (Zebrastreifen) und der Passant sind durch das rote Auto verdeckt und schwer zu erkennen. Es ist nicht klar, ob eine Person die Straße kreuzen möchte.

Herausforderung: Verdeckte Hindernisse
Das Fahrzeug muss hier einen Passanten hinter einem Hindernis erkennen.
Mögliches Lösungsszenario: Ein Vorteil des autonomen Fahrzeugs ist eine schnellere Reaktion auf Events wie eine kreuzende Person. Die Schrecksekunde, die der Mensch in der Regel hat, entfällt normalweise. Besonders der Ultraschall ist für die Nahbereichserkennung zuständig und hilft, Fahrzeuge durch solche schwierigen Situationen zu führen. In diesem Szenario kann auch eine V2V Kommunikation helfen, in der ein vorausfahrendes Fahrzeug die fehlenden Informationen übergibt. Die Kommunikation mit Passanten ist unerlässlich. Dies kann zum Beispiel durch ein Outside Display mit Gestenerkennung stattfinden, um einem Passantenwunsch zu erkennen und diesem nachzukommen. Das Ziel ist es, dass Fahrzeug und Passant miteinander kommunizieren, um Missverständnisse zu verhindern.
Passive Verkehrsobjekte wie stehende Fahrräder
Der Fahrradständer direkt an der Straße kann zur Erkennung von Verkehrsteilnehmern führen, die in diesem Szenario jedoch ignoriert werden können, da sie nicht aktiv in das Verkehrsgeschehen eingreifen. Eine Herausforderung für die Objekterkennung sind auch verschiedene Alltagsobjekte wie Mülltonnen. Diese Objekte können zum Beispiel auch auf die Straße kippen und müssen dementsprechend berücksichtigt werden. Über eine Zeitung kann gefahren werden, über eine Mülltonne nicht.

Herausforderung: Undefinierbare Objekte
Wichtig ist, unbekannte Objekte möglichst korrekt identifiziert und einzuschätzen.
Mögliches Lösungsszenario: Zunächst wird die Objekterkennung durch Kameras im Fahrzeug ermöglicht. Lidar und Radar können zusätzlich bei der Verifizierung helfen, da sie Strukturen erkennen können und eine genaue Distanzabschätzung liefern. Die korrekte Objekt-Klassifizierung ist eine Grundvoraussetzung, um anschließend die verkehrstechnisch richtigen Entscheidungen treffen zu können. Hierzu sind gerade solche Testfahrten außerhalb von Laborbedingungen immens wichtig.
Aufspurender Fahrradweg, zu dem ein Abstand gehalten werden muss

Herausforderung: Aufspurender Fahrradweg
Einerseits muss ein autonomes Fahrzeug Objekte, die auf einem Fußgängerweg sind, ignorieren, andererseits können diese Objekte relevant werden, wenn sie den Bürgersteig verlassen und auf den Fahrradstreifen wechseln. Generell sind Fahrradfahrer durch hohe Geschwindigkeit und mangelnde Einschätzbarkeit (auch durch nicht regelkonformes Verhalten) eine harte Nuss für autonome Fahrzeuge.
Mögliches Lösungsszenario: Das Fahrzeug muss diese Situation erfassen (aufspurender Fahrradweg) und mit dem 360° Scan die anderen Verkehrsteilnehmer erkennen und bewerten, wie diese in das Geschehen eingreifen könnten. Auch hier ist das Trainieren der KI ein entscheidender Erfolgsfaktor.
Die Haltelinie ist nicht ersichtlich
In der folgenden Situation ist die Linienerkennung schwierig.

Herausforderung: Schwierige Linienerkennung
Das Fahrzeug muss sich auch in solchen Situationen souverän und verkehrskonform verhalten.
Mögliches Lösungsszenario: Das Definieren von Regelwerken in Sonderfällen muss erfolgen. Dabei sollte sich an anderen Objekten, wenn möglich (beispielsweise Orientierung an den Ampelsystemen), orientiert werden.
Das unberechenbare Verkehrsteilnehmerverhalten
Das Verhalten anderer Verkehrsteilnehmer muss korrekt erkannt werden. Einerseits muss sich das autonome Fahrzeug vorsichtig über die Straßen bewegen, andererseits muss jedoch auch ein flüssiger Fahrstil ermöglicht werden.

Herausforderung: Erkennen von Verkehrsteilnehmern
Hier ist es wichtig, den von rechts kommenden Verkehr zu berücksichtigen und richtig einzuschätzen.
Mögliches Lösungsszenario: Einerseits kann hier eine Kommunikation via V2V zwischen den Fahrzeugen stattfinden. Des Weiteren wäre zu erwarten, dass sich das Fahrzeug verkehrskonform verhält (durchgezogene Linie). Im Training muss das Fahrzeug lernen solche Situationen durch die Sensorik richtig wahrzunehmen und entsprechend zu handeln.
Auf der Straße liegender Schnee
Schnee auf der Straße kann ebenfalls zur Beeinträchtigung der Sicht von Linien führen sowie den Straßenreibwert verändern.

Herausforderung: Wettereinflüsse
Verschiedene Wettereinflüsse können die Objekterkennung erschweren.
Mögliches Lösungsszenario: Erkennen von Schnee und die zusätzliche Berechnung bzgl. des Bremswerts sind essentiell. Plausibilisierung über V2X (Blitzeiswarnung über Wetterprovider) ist ebenfalls eine Möglichkeit, um der KI die Informationen zukommen zu lassen.
Überqueren von Fahrbahnen – Einschätzen von entgegenkommendem Verkehr
Beim Abbiegen oder Queren von anderen Fahrbahnen muss ein besonderer Fokus auf andere Verkehrsteilnehmer gelenkt werden.
Herausforderung: Andere Verkehrsteilnehmer und deren Verhalten
Einschätzen von anderen Verkehrsteilnehmern. Beim Linksabbiegen muss der Gegenverkehr beachtet werden und eine Einschätzung getroffen werden.
Mögliches Lösungsszenario:
Auch hier hilft der Lidar bei der Erkennung von Entfernungen und Abmessungen.
Fazit:
Wie bereits in Teil 1 analysiert, stellt das Autonome Fahren eine Mammutaufgabe für die Sensorik wie hochauflösende Kameras, Lidar, Radar, Ultraschall und die IT Systeme im Hintergrund dar. Beim Abfahren der ZF Teststrecke stellt sich an mancher Stelle immer wieder die Frage: Wie würde hier jetzt ein autonomes Fahrzeug entscheiden? Schlüssel zum Erfolg ist das Trainieren der KI und die Berücksichtigung bzw. das Training auf mögliche (wenn auch unwahrscheinliche) Sonderfälle oder der Umgang mit komplexen Situationen mit unvorhersehbaren Komponenten. Auch das Thema V2X und Connected Mobility Services im Backend sind entscheidend, damit das Fahrzeug im Straßenverkehr souverän und vor allem unfallfrei agieren kann. Das wird auch im abschließenden zweiten Teil dieser Serie deutlich.
Zur Teststrecke selbst: Zusammenfassend lässt sich sagen, dass die ZF Teststrecke gut gewählt ist und für ein autonomes Fahrzeug eine Herausforderung darstellt. Die Bedingungen an dem Testtag waren ideal – viel Sonnenschein und wenig Verkehr. Gerade der Abschnitt durch die Stadt mit unterschiedlichen volatilen Verkehrshindernissen und Verkehrsteilnehmern wird für viele Herausforderungen für die Entwicklung bzgl. des autonomen Fahrens sorgen, bei der unterschiedliche Lösungsszenarien konzipiert werden müssen.
Teil 1 zur ZF Teststrecke hier lesen
Wussten Sie schon?
In verschiedenen Kundenprojekten mit unterschiedlichen OEMs und Zulieferern arbeitet doubleSlash an den Themen „Virtuelle Testumgebungen für Fahrzeuge und V2X Kommunikation“ mit. Das Erstellen von Connected Mobility Applikationen über den gesamten Softwarelebenszyklus ist eine Kernkompetenz von doubleSlash.
Mehr zu Connected Car und autonomem Fahren gibt’s hier
Quellen:
https://www.suedkurier.de/region/bodenseekreis/friedrichshafen/Alle-Fakten-zur-Teststrecke-fuer-autonomes-Fahren-in-Friedrichshafen;art372474,9824810
https://iwt-bodensee.de/iwt-und-zf-initiieren-teststrecke-fuer-automatisiertes-fahren-in-der-stadt-friedrichshafen/
