Industrialisierte Absicherung: Wie autonome Fahrfunktionen reif für den „Führerschein“ werden
„Erste autonome Fahrzeuge unterwegs. Seit Anfang 2020 gibt es in Friedrichshafen auf einer speziell ausgestatteten Strecke Testfahrten für vollständig autonome Fahrzeuge.“ So könnten Überschrift und Aufmacher in der Zeitung lauten. Wenn denn autonome Fahrzeuge in Deutschland bereits eine Zulassung – quasi einen Führerschein – hätten. Die Teststrecke wird tatsächlich bereits seit Herbst 2018 befahren1 – allerdings mit Fahrzeugen, die allesamt eine Zulassung nach heute gültigen Verkehrsstandards haben und einen menschlichen Fahrer an Bord.
Primäres Ziel ist in diesem ersten Schritt das Sammeln von Daten. Was passiert mit diesen Daten? Und wie können wir sicher sein, dass die vollautonomen Fahrzeuge irgendwann ihre „Führerscheinprüfung“ bestehen? Das Erfolgsrezept heißt „industrialisierte Absicherung“. Was das ist, schauen wir uns im Folgenden genauer an.
Sicher die richtige Entscheidung treffen
Wir als Menschen lernen in 20 bis 30 Stunden die Verkehrsregeln, das Fahrzeug zu bedienen und uns regelkonform im Straßenverkehr zu bewegen. Bis zur Führerscheinprüfung erleben wir eine überschaubare Anzahl von realen Situationen, die wir bewerten müssen, um dann korrekt zu entscheiden.
Davor haben wir aber in der Regel rund 18 Jahre unseres Lebens in der realen Welt verbracht, bis der Gesetzgeber uns die „Führerscheinreife“ bescheinigt, wir also überhaupt die Prüfung machen dürfen. Viele Situationen haben wir aus unterschiedlichen Blickwinkeln als Fußgänger, Radfahrer, Beifahrer selbst erlebt oder bei anderen beobachtet. Unser Erfahrungsschatz ist also deutlich größer als er in 20 bis 30 Fahrstunden erworben werden kann. Und er wächst mit jeder Minute, die wir am Straßenverkehr teilnehmen.
Eine autonome Fahrfunktion kann auch nur richtig entscheiden, wenn sie sich in ausreichend vielen Szenarien bewährt hat. Das alles in der realen Welt zu überprüfen dauert lange – und kann bei Fehlentscheidungen schmerzhaft sein. Deswegen braucht jede autonome Fahrfunktion (Lenken, Bremsen, Beschleunigen etc.) unzählige simulierte Szenarien, um zu lernen und die „Führerscheinreife“ zu bekommen. Erst dann darf der „künstliche Fahrer“ mit dem Fahrzeug auf die Straße – für weitere „Fahrstunden“ und zur Erlangung des „Führerscheins“.
Warum die Welt für autonome Fahrfunktionen so kompliziert ist
Nun ist eine autonome Fahrfunktion kein Mensch, sondern ein Stück Software, das aus einer Vielzahl von Algorithmen besteht, die richtig zusammenspielen müssen. Das Prinzip ist immer das Gleiche: Ein Sensor bekommt Informationen aus der realen Welt. Ein Algorithmus bewertet die Information und trifft eine Entscheidung. Ein Aktor führt die Entscheidung aus. Was muss beachtet werden?
- Der Auslöser der Verkehrssituation: z.B. Ball rollt auf die Straße
- Die zeitliche Verkettung, z.B. Ball rollt auf die Straße, dann rennt Kind hinterher
- Mehrere Ereignisse gleichzeitig: z.B. nasse Straße, Fußgänger kreuzt und Auto möchte ausparken
- Umgang mit Unschärfen: z.B. schlechte Lichtverhältnisse erschweren Identifizierung von Objekten2
Absicherungsplattform für autonome Fahrfunktionen
Bevor es auf die Straße geht, werden die Algorithmen für autonome Fahrfunktionen deshalb mit einer Vielzahl von Verkehrsszenarien trainiert. Dabei wird die Software gegen bestimmte Szenarien entwickelt und muss sich anschließend in der Verkettung Ende-zu-Ende bewähren.
Eine Absicherungsplattform bietet dem Entwickler die Möglichkeit, auf eine Datenbank mit virtuellen und realen Verkehrsszenarien zuzugreifen. In diese Datenbank könnten auch die gesammelten Daten aus der eingangs erwähnten Teststrecke in Friedrichshafen einfließen. Virtuelle Verkehrsszenarien sind immer dann wichtig, wenn bestimmte Ereignisse wie Schneefall oder Nebel einfach nicht eintreten wollen oder sehr aufwändig zu erfassen sind. Simulationsingenieure können dann aus verschiedenen Szenarien neue zusammenstellen.
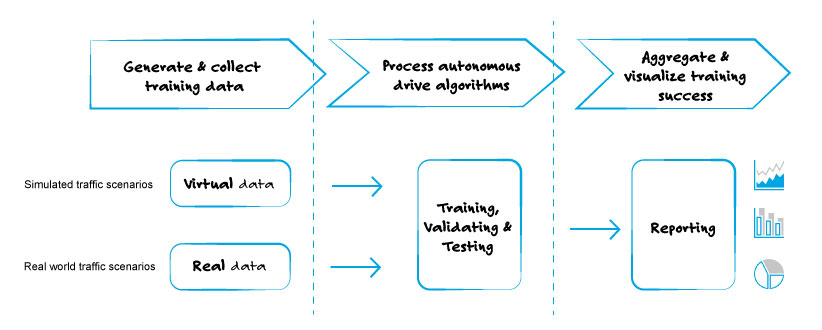
In solchen Fällen werden die fertig programmierten Algorithmen mit diesen künstlich erzeugten Szenarien ausgeführt. So wird zum Beispiel das Bild vom rollenden Ball bei der Ausführung des entsprechenden Algorithmus eingespielt. Der Algorithmus verarbeitet die Information und führt die Aktion aus – ohne in einem Fahrzeug verbaut zu sein und ohne reale Situation. Auf diese Weise lassen sich Szenarien vieltausendfach parallel innerhalb wesentlich kürzerer Zeit durchspielen, als es in Realzeit möglich wäre. Anhand des Feedback können die Entwickler dann die Software immer weiter verbessern.
Wenn die Algorithmen alleine mit vielen Szenarien zurechtkommen, haben sie einen ersten Reifegrad erreicht. Im nächsten Schritt wird die Absicherung ausgeweitet: Auf jedes Verkehrsszenario folgt ein weiteres, und es wird nicht nur ein Aktor angesteuert, sondern verschiedene. Auch für diese Absicherung gibt es Feedback an die Entwickler.
Irgendwann sind alle Fahrfunktionen eines vollautonomen Fahrzeugs anhand unzähliger Szenarien trainiert. Die Ergebnisse sind dokumentiert und wiederholbar. Erst jetzt beginnt die Integration in die Hardware – das Auto. Und es folgt die nächste Stufe der Absicherung. Wenn jetzt die Aktoren richtig angesteuert werden und reagieren, haben die Fahrfunktionen die Führerscheinreife erreicht. Diesen Reifegrad kann man über eine Reporting-Komponente messen.
Damit ist unser Fahrzeug aber erst bereit für Fahrstunden auf der Teststrecke. Zusammen mit einem Fahrer – quasi dem Fahrlehrer.
Die ganze Absicherung der Software geschieht auf einer eigenen Softwareplattform. Damit werden Qualität, Wiederholbarkeit und weitestgehende Automatisierung von Softwareentwicklung und -tests sicherstellt.
Erfolgsfaktoren und Herausforderungen für eine Absicherungsplattform
Der Aufbau einer Absicherungsplattform für autonome Fahrfunktionen ist eine Herausforderung für die Softwarearchitektur und -entwicklung. Wiederholbarkeit und Skalierbarkeit sind essenziell, um die programmierten Funktionen vertrauenswürdig zu machen. Die Entwicklung von Fahrfunktionen muss genauso sorgfältig und industrialisiert ablaufen wie die Entwicklung des physischen Fahrzeugs.
Die fünf wichtigsten Erfolgsfaktoren für eine industrialisierte Absicherung sind aus unserer Sicht:
- Hochskalierbare Plattform und Infrastruktur durch Nutzung von Container-Technologien. Dabei wird die Simulationssoftware und alle zu testenden Algorithmen in Container verpackt und kann dadurch theoretisch beliebig oft parallel aufgerufen werden.
- Benutzerfreundliche Datenmanagement-Lösung, um das Auffinden der benötigten Szenarien zu ermöglichen. Sie werden damit für die unterschiedlichen Anforderungen von Entwicklern der KI-Komponenten sowie von Simulations- und Testingenieuren gleichermaßen nutzbar.
- Automatisierte Berechnung von Key Performance Indikatoren nach jeder Änderung des Algorithmus inklusive Versionshistorie. Solche KPIs messen die Veränderungen der Güte des Algorithmus im Laufe der Zeit. Damit wird der Grad des Vertrauens in die Fahrfunktionen messbar.
- Absicherung in einer möglichst Hardware nahen Umgebung, damit die Absicherungsergebnisse aussagekräftig sind.
- Agile Zusammenarbeitsmodelle unter Einbeziehung aller Nutzergruppen und aller Partner. Nur wenn alle am Projekt beteiligten Menschen eng und nutzenorientiert zusammenarbeiten und ausreichend Möglichkeiten zur Synchronisierung haben, kann ein solches Vorhaben gelingen.
Fazit
Wenn voll autonome Fahrzeuge überhaupt möglich werden und im Idealfall die Sicherheit im Straßenverkehr erhöhen sollen, müssen sie besser entscheiden und reagieren als ein Mensch. Die Fahrfunktionen müssen in sehr kurzer Zeit das lernen, was ein Mensch über Jahrzehnte lernt – und noch mehr. Erst dann werden wir der Fahrfunktion vertrauen können. Eine industrialisierte Absicherungsplattform für autonome Fahrfunktionen unterstützt diesen Lernprozess bis zur Führscheinreife. Wiederholbarkeit und Skalierbarkeit sind dabei die wichtigsten Anforderungen an die Plattform.
Mehr über Connected Mobility Dienste des Fahrzeugs erfahren
Das könnte Sie auch interessieren: Mit der Cloud vielfältige Fahrszenarien lernen – Wie die Cloud bei großen Datenmengen in der Testausführung von autonomen Fahrzeugen unterstützt
Quellen:
2 https://blog.doubleslash.de/der-bias-effekt-im-machine-learning/
