
„Vision Zero“ durch autonomes Fahren?
Seitdem das Automobil am 29. Januar 1886 von Carl Benz patentiert wurde, hat es sich über die Jahre hinweg weiterentwickelt. Neue Technik bringt die Mobilität wie auch Sicherheit der Autos voran. Und heute schon stehen wir vor dem Wandel vom selbst bewegten zum selbständigen Fahrzeug.
Doch wann spricht man überhaupt von selbständigem oder vollautomatisiertem Fahren und welche zusätzlichen Sicherheitspotenziale verspricht diese prophezeite Art der Mobilität?
Die fünf Stufen auf dem Weg zum autonomen Fahren
Der Schritt zum autonomen Fahren ist nicht von heute auf morgen möglich – vielmehr handelt es sich um einen stufenweisen Prozess.
Spricht man also von automatisiert im Zusammenhang mit dem Automobil, so muss zwischen fünf verschiedenen Automatisierungsstufen unterschieden werden:
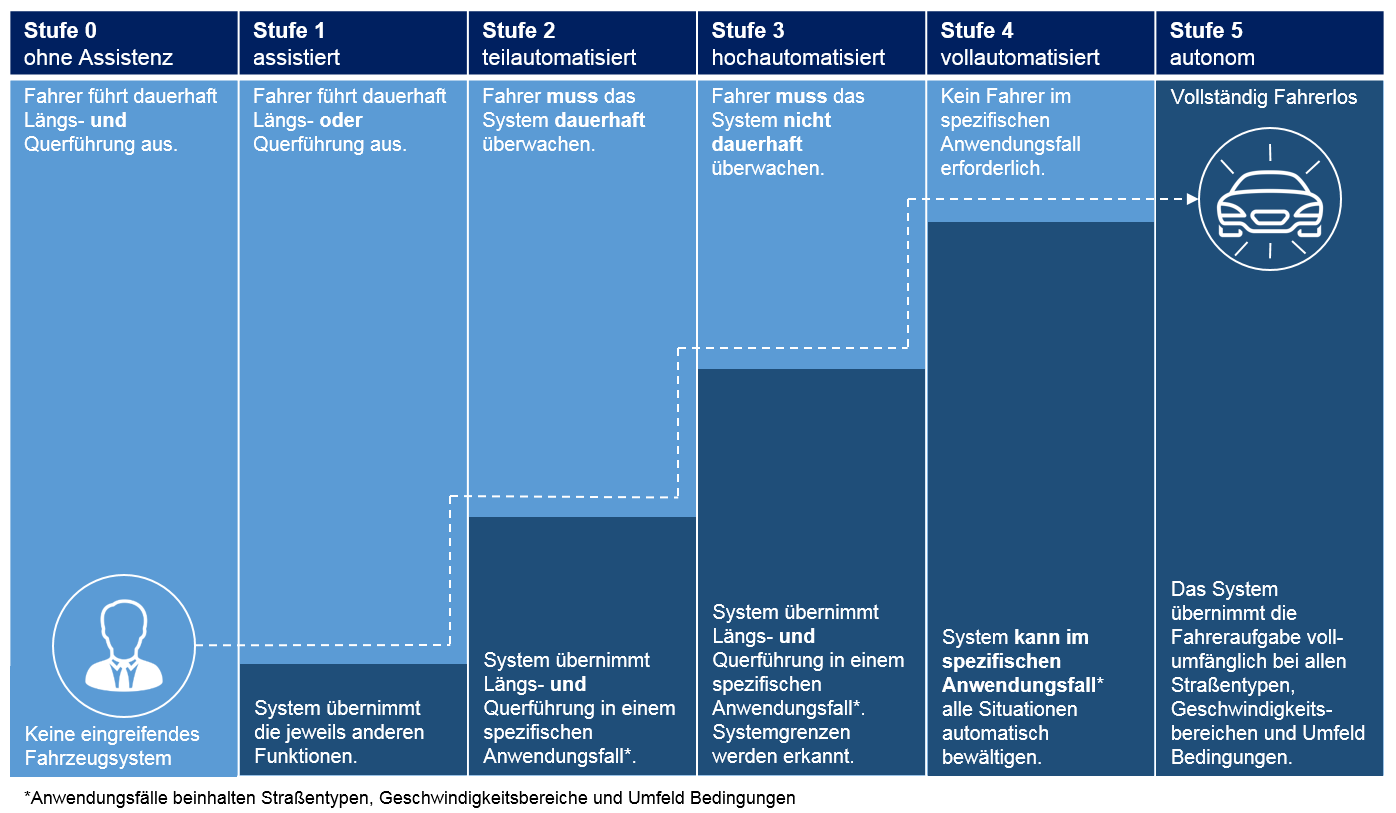
Stufe 0 – „Driver only“:
Fahrzeuge dieser Stufe besitzen keinerlei integrierte automatisierte Fahrfunktionen. Eingreifende Systeme in die Längs- oder Querführung (d.h. beschleunigen, bremsen oder lenken), sind somit nicht vorhanden.
Stufe 1 – assistiertes Fahren:
Assistierende Systeme wie das Antiblockiersystem (ABS), die Fahrdynamikregelung (ESP), der Notbremsassistent, der Fahrhalteassistent oder Komfortdienste wie der Tempomat, sind mittlerweile ausgereift und zum Standard geworden. Systeme dieser Art können jederzeit auf die Längs- oder Querfunktion des Fahrzeugs zugreifen.
Stufe 2 – teilautomatisiertes Fahren:
Teilautomatisierung hebt sich vom assistierten Fahren ab, weil das System in einem spezifischen Anwendungsfall und unter dauerhafter Überwachung des Fahrers sowohl die Längs- als auch Querführung des Fahrzeugs übernehmen kann. Diese Stufe ist bereits allgegenwärtig und findet sich in Park-Assistenten, Überhol-Assistenten und Stau-Assistenten wieder. [1]
Stufe 3 – hochautomatisiertes Fahren:
Hochautomatisiertes Fahren ist dadurch gekennzeichnet, dass das System in einem spezifischen Anwendungsfall, beispielsweise auf der Autobahn, nicht mehr dauerhaft vom Fahrer überwacht werden muss. Entsprechen die Umgebungsbedingungen (z.B. in Baustellensituationen) jedoch nicht mehr dem Funktionsumfang des Assistenzsystems, so wird der Fahrer frühzeitig darauf hingewiesen und er muss die Fahraufgabe wieder übernehmen. Zur Realität könnte diese Stufe bereits im Jahr 2021 werden. [4]
Stufe 4 – vollautomatisiertes Fahren:
Die Vollautomatisierung ist die Vorstufe zum autonomen Fahren und dadurch charakterisiert, dass die komplette Fahraufgabe in spezifischen Anwendungsfällen an das System übergeben werden kann. Ab dieser Stufe interagiert das Fahrzeug mit der unmittelbaren Umgebung und kann mit anderen Fahrzeugen kommunizieren. Große Hürden sind in diesem Zusammenhang vor allem die Car2Car Communication, d.h. die Verständigung unter den Fahrzeugen, und die Car2X Communication, also die Verständigung zwischen Fahrzeug und der Umgebung. [2]
Stufe 5 – autonomes Fahren:
Autonomes Fahren stellt die Endstufe der Automatisierung dar und ist dann gege-ben, wenn das Fahrzeug vollumfänglich und systemeigenständig auf allen Straßentypen, in allen Geschwindigkeitsbereichen und unter allen Umfeldbedingungen interagieren kann. Lenkrad und Pedale werden entbehrlich, sodass jeder Fahrzeuginsasse zum Passagier wird. [4]
Die „Vision Zero“ zielt darauf ab, Straßen und Verkehrsmittel so sicher zu gestalten, dass es zukünftig keine Verkehrstoten oder Schwerverletzten mehr im Straßenverkehr gibt. [8] Derzeit ereignet sich ein tödlicher Verkehrsunfall im Schnitt…
- alle 2,8 Stunden in Deutschland,
- alle 25 Minuten in den USA und
- alle 26 Sekunden weltweit.
Zahlen, die widerspiegeln, wie wichtig es ist, Fahrzeuge noch sicherer zu gestalten.
Anhand des nachfolgenden Diagramms sind die Zahlen der Verkehrsunfälle mit Todesfolge auf einer zeitlichen Achse dargestellt. Um diese Entwicklung in Zusammenspiel mit zunehmender Automatisierung aufzuzeigen, sind zudem Assistenzsystem-Meilensteine nach deren zeitlicher Einführung eingegliedert.
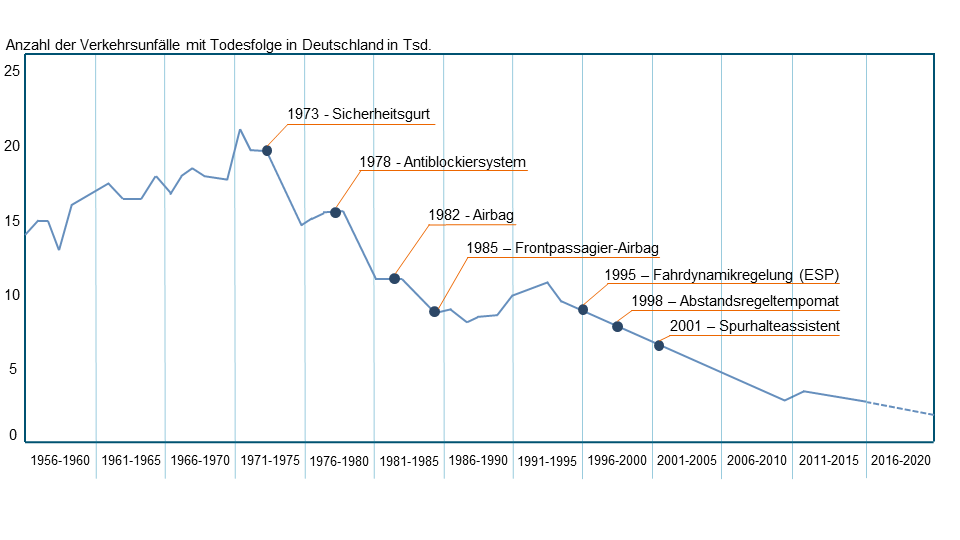
Bildquelle: Eigene Darstellung in Anlehnung an https://www.destatis.de/DE/Presse/Pressekonferenzen/2018/Verkehrsunfaelle-2017/pressebroschuere-unfallentwicklung.pdf?__blob=publicationFile&v=3
Trotz stetig zunehmender Verkehrsleistung zeigt sich, dass die Zahl der tödlich verunglückten Verkehrsteilnehmer in Deutschland seit dem Jahr 1970 rückläufig ist. Ein Rückgang, der mitunter eindeutig auf die Einführung neuer Automatisierungssysteme zurückzuführen ist.
Natürlich sind die Ursachen für jeden Unfallhergang unterschiedlich. Doch aus Zahlen des statistischen Bundesamtes geht hervor, dass 88 Prozent aller Verkehrsunfälle auf das Fehlverhalten der Fahrzeugführer zurückzuführen sind. Gerade einmal ein Prozent der Unfallursachen sind technischer Natur. [3]
In erster Linie sind die Schwächen an die unterschiedlichen Charakteristika des Menschen gebunden. Jeder Mensch ist ein Individuum und besitzt verschiedene Eigenschaften (Alter und Persönlichkeit), Fähigkeiten (körperliche- und geistige Leistungsfähigkeit) und Fertigkeiten (Erfahrung und Fahrstil).
Zusätzlich kommen zu den Charakteristika auch noch Störgrößen hinzu, die während der Autofahrt einfließen können. Hierzu gehören beispielsweise die Kommunikation mit dem Beifahrer oder das Bedienen des Smartphones. Schon kleine Ablenkungen sorgen dafür, dass sich die Informationsaufnahme des Fahrers auf etwas anderes fixiert. [9]
Im Gegensatz zum Menschen nimmt ein vollautomatisiertes Fahrzeug seine Umgebung mittels Sensoren, wie Kameras und Radarsensoren, im Zusammenspiel mit digitalen Karten und anderen, in Echtzeit verfügbaren, Informationen wahr. Das Fahrzeug verarbeitet die aufgenommenen Daten, registriert diese durch eine vorgegebene Programmierung und entwickelt ein maschinelles Szenenverständnis. [11]
Weder Störgrößen noch menschliche Charakteristika fließen in den Informations- und Entscheidungsprozess ein. Des Weiteren sorgen gerade die verbauten Sensoren und Kameras für enormes Potenzial, da diese eine 360-Grad Rundumsicht ermöglichen. Gefahren können zudem mittels Mono-, Stereo- oder Infrarotkameras frühestmöglich erkannt werden; Abstände lassen sich durch ein Radar analysieren. Bei drohender Gefahr leitet das Fahrzeug somit frühzeitige Bremsvorgänge oder Ausweichmanöver ein. [10]
Beispielszenario:
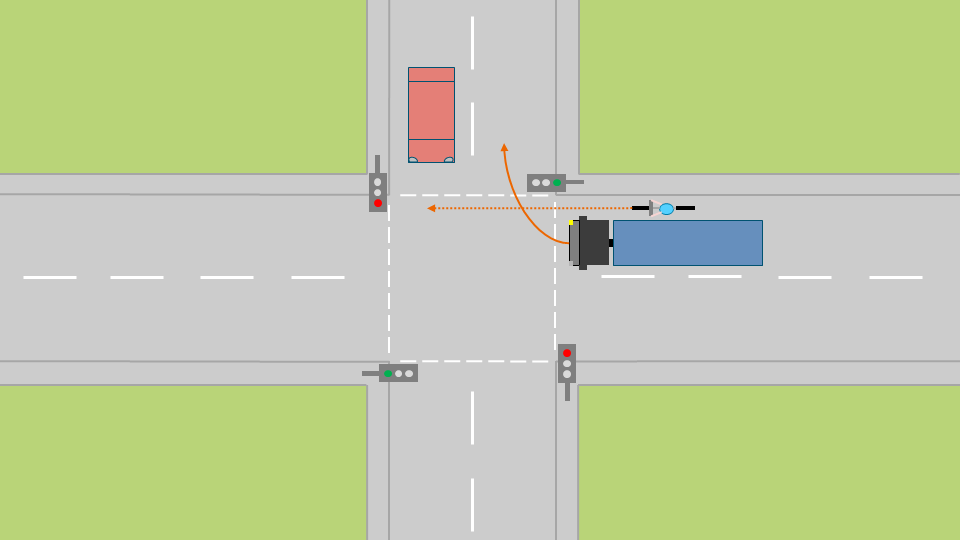
Ausgangssituation:
Ein Radfahrer überquert bei Grün die Fahrbahn. Ein parallel fahrender, rechtsabbiegender LKW kreuzt ihn.
Resultat – Stufe 0 („Driver only“):
Je nach Konzentration und Aufmerksamkeit des LKW-Fahrers, kann ein Unfall durch Vorhersehen der Situation verhindert werden. Andernfalls kollidieren LKW und Fahrradfahrer.
Resultat – Stufe 1 (assistiertes Fahren):
Ein, in diesem Szenario, beispielhaftes assistierendes System ist der Totwinkelassistent. Sensoren um den LKW erkennen die unmittelbare Umgebung und übermitteln dem Fahrer ein frühzeitiges Warnsignal. Alle anschließenden Handlungen müssen jedoch vom Fahrer selbst durchgeführt werden. Wird der Warnhinweis ignoriert, kommt es zur Kollision.
Resultat – Stufe 2 und 3 (teilautomatisiertes und hochautomatisiertes Fahren):
Die am LKW angebrachten Sensoren erkennen den annähernden Fahrradfahrer über ein erweitertes Totwinkelassistenzsystem und leiten neben einem Warnsignal zusätzlich ein Ausweichmanöver oder einen Bremsvorgang ein. Eine Kollision wird vermieden.
Hochautomatisiertes Fahren wird vorerst nur auf Autobahnen stattfinden.
Resultat – Stufe 4 und 5 (vollautomatisiertes und autonomes Fahren):
Der vollautomatisierte LKW ist mit Sensorik ausgestattet und erkennt die annähernde Gefahr durch den Fahrradfahrer. Der LKW und das rote Fahrzeug stehen zudem in direkter Car2Car-Kommunikation. Erkennt das rote Fahrzeug eine Gefahr für den Fremdverkehr, übermittelt dieser dem LKW ein zusätzliches Warnsignal. Dem geradeaus fahrenden Fahrradfahrer wird der Vortritt gewährt – eine Kollision wird vermieden.
Fazit – autonomes Fahren und Vision Zero bleiben erstmal Wunschvorstellung
Mit Blick auf die Automatisierungsstufen kann man sagen, dass wir uns heute gerade ein-mal am Rande der Stufe 3 befinden. Nichtsdestotrotz ist es – historisch gesehen – schon ein großer Erfolg, dass die zunehmende Automatisierung sich positiv auf Sicherheitspotenziale und Unfallvermeidung auswirkt. Da der Mensch die Unfallfehlerquelle Nummer eins ist, bleibt zu erwarten, dass sich durch zunehmende Automatisierung die Unfallzahlen weiter senken lassen.
Vollautomatisierte und autonome Fahrzeuge sind hingegen nicht von Charakteristika beeinflusst. Sie interagieren nach vorprogrammierten Regeln und Algorithmen. Im Gegenzug müssen jedoch auch die damit einhergehenden Gefahren in Betracht gezogen werden. So muss jedes im Verkehr teilnehmende Objekt richtig erkannt und gedeutet werden. Bereits kleinste Programmierfehler können katastrophale Ausmaße haben. Zudem müssen zukünftig auch hohe Anforderungen an die Datensicherheit gewährleistet werden, um die Fahrzeuge vor Hackern zu schützen.
Das Thema autonomes Fahren ist also weiterhin spannend und es bleibt abzuwarten, wann die ersten selbstgesteuerten Fahrzeuge tatsächlich im öffentlichen Straßenverkehr in Erscheinung treten. Entscheidend wird sein, wie sich diese in der Übergangsphase –ohne Automatisierung hin zu Vollautomatisierung – unter Beweis stellen.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.Mehr erfahren
Fest steht, die „Vision Zero“ ist und bleibt vorerst eine Wunschvorstellung. Vermehrte Automatisierung wie auch beisteuernde Datenkommunikationen zwischen Fahrzeug und unmittelbarer Umgebung bieten jedoch enormes Sicherheitspotenzial und können künftig dazu beitragen, das Ziel „Vision Zero“ greifbarer zu machen.
Diese Blogbeiträge könnten Dich auch interessieren:
Quellen:
[1] https://www.fuw.ch/article/die-revolution-in-der-automobilindustrie-beginnt-jetzt/[2] https://www.dondahlmann.de/?p=24974
[3] https://www.destatis.de/DE/Presse/Pressekonferenzen/2018/Verkehrsunfaelle-2017/pressebroschuere-unfallentwicklung.pdf?__blob=publicationFile&v=3 [4] https://www.bmw.com/de/automotive-life/autonomes-fahren.html
[5] https://www.adac.de/rund-ums-fahrzeug/autonomes-fahren/autonomes-fahren-5-stufen/
[6] https://fuhrpark.de/teil-1-der-autonome-stufenplan
[7] https://www.adac.de/rund-ums-fahrzeug/autonomes-fahren/car2x-kommunikation/
[8] https://www.dguv.de/de/praevention/visionzero/index.jsp
[9] [Hakuli u.a. 2015] Hakuli, Stephan; Lotz, Felix ; Winner, Hermann ; Singer, Christi-na (Hrsg.): Handbuch Fahrerassistenzsysteme. 3. Auflage. Wiesbaden : Springer Vieweg, 2015
[10] [VDA 2015] VDA: Automatisierung – Von Fahrerassistenzsystemen zum automa-tisierten Fahren. In: Verband der Automobilindustrie e.V. (2015), September
[11] [Dietrich und Minx 2015] Dietrich, Rainer; Minx, Eckard: Autonomes Fahren – Wo wir heute stehen und was noch zu tun ist. Daimler und Benz Stiftung, Oktober 2015
